
大会设有交通运输执法之道、交通运输执法之脑、交通运输执法之盾、交通运输执法之翼四个主题馆,云圣智能携圣·宝莲灯全自主巡检系统、圣Max·战袍全自主巡检系统、虎鲸·虎穴全自主巡检系统等智能巡检产品亮相交通运输执法之盾主题展馆,向到场领导、行业专家及与会观众展现工业级无人机系统在交通执法领域的技术实力和应用价值。期间,交通部公路局路网管理处处长贺志高,宁夏交通运输综合执法监督局党委副书记、局长张聪以及宁夏公路勘察设计院赵旭东宁夏交通运输综合执法监督局李铁、李进保等领导到访云圣智能展台。在感受产品细节并了解先进技术后,到场领导对云圣智能给予高度评价。

交通部公路局路网管理处处长贺志高;宁夏交通运输综合执法监督局党委副书记、局长张聪一行到访云圣智能展台
宁夏公路勘察设计院赵旭东宁夏交通运输综合执法监督局李铁、李进保一行到访云圣智能展台
会上,云圣智能联合创始人&CMO朱胜利博士在大会主旨论坛中进行了题为《全自主智能无人机系统助力立体交通数智化体系建设》的精彩演讲。
根据《交通强国建设纲要》规划的目标,到2035年,我国要基本建成交通强国;到本世纪中叶,全面建成人民满意、保障有力、世界前列的交通强国。新版《国家公路网规划》指出,我国公路投资额在2021年已经超过25000亿元,到2035年,普通国道总里程达29.9万公里,对公路的安全巡护愈发重要。
面对传统人工巡护“盲区多、响应慢、效率低、管控难、成本大”等现状难点,云圣智能基于全自主工业无人机和全自动机场,结合数字孪生、人工智能与大数据分析等先进技术,建设空地一体全自主无人机智慧巡检系统。系统基于“技术创新、模式创新、应用创新”原则,将更加聚焦于道路巡检应用的“感知神经元网络”端边云一体化综合建设,为交通系统打造集“预案、决策、指挥、调度、分析”于一体的“平战结合”数字孪生中台,构建“事前、事中、事后”全流程监管体系,实现交通线路平稳高效运行的良性推动。
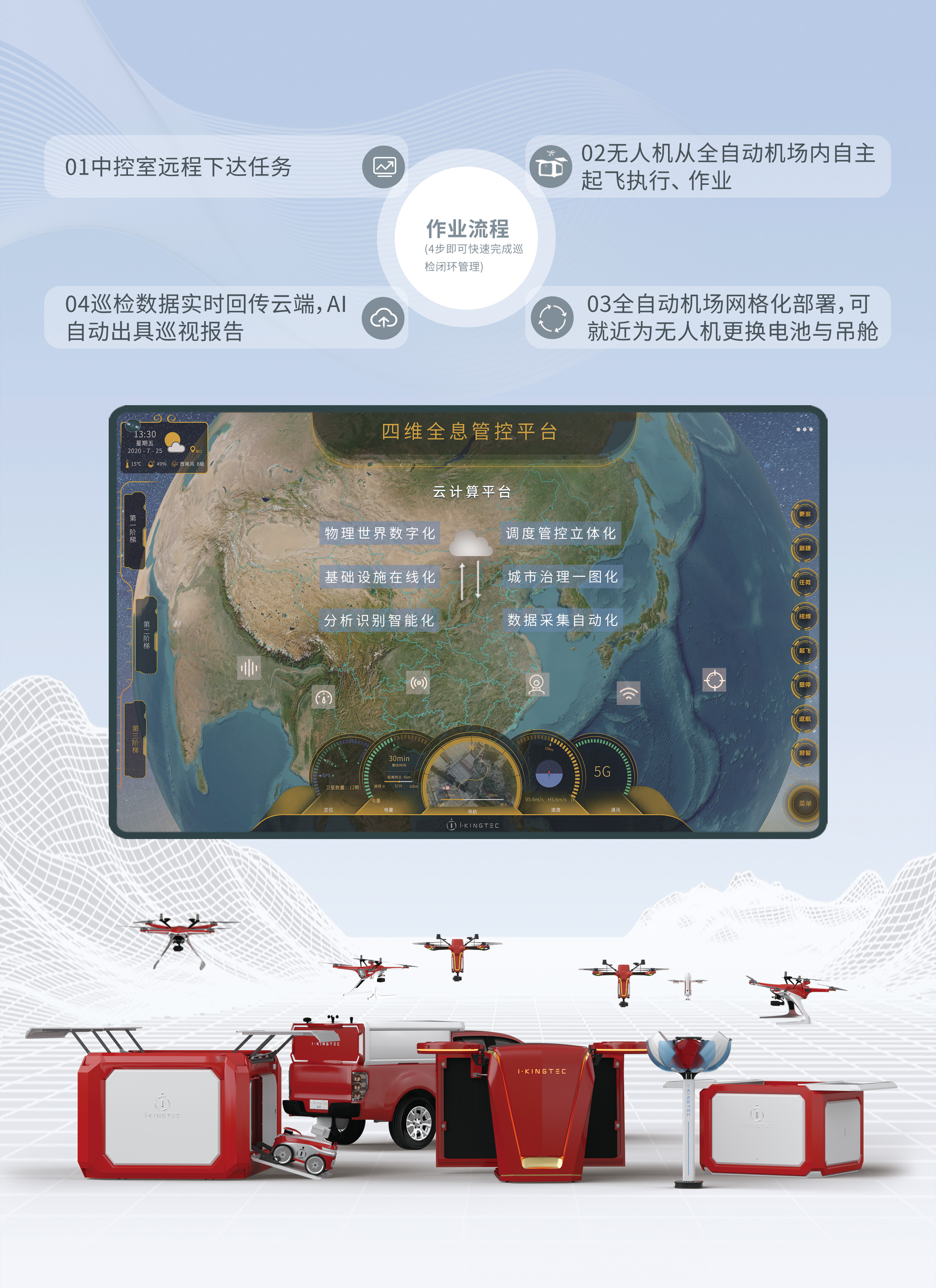
云圣智能的空地一体化全自主无人机智慧巡检系统(系统主要由工业无人机、全自动机场、四维全息管控平台组成)可实现作业全过程无需人工干预,自动规划航迹、3D自主飞行、数据实时回传、智能分析等功能。
四维全息管控平台作为无人机、全自动机场的中央控制大脑,智能规划巡检任务航线,实时管控、智能交互,同时结合具体业务应用场景,运用云圣自研AI智能算法和大数据分析系统,实现任务从下发、执行采集、数据自主处理、成果可视化调阅等闭环管理,满足路政巡查、事故处理、交通疏导、工程监护等多场景应用。工作人员通过四维全息管控平台自动规划建模航线,平台可同时启动单/多架无人机协同作业,无人机自动搭载电池及多元传感器吊舱,并依据航线自主飞至目标点位拍摄,如无人机电量低时,将自动降落至最近的全自动机场内,53秒即可完成更换并再次起飞。相比传统无人机巡检人工操作的繁琐,云圣智能通过虎视四维全息管控平台可直接远程调度无人机从机场起飞进行全自主作业,从任务规划到航线执行,从数据采集到云端处理,所有环节全部自动完成,实现多场景、全流程、全天候的自主化巡检。
四维全息管控平台作为数字孪生式平台,工作人员可通过大屏监测到每一台接入系统的设备,并可远程调配控制,实现整个公路巡检的体系化、智能化、可视化、全流程化管理,实现任务从下发、执行,数据自主采集、处理,成果可视化调阅等闭环管理。
无人机搭载可见光吊舱及激光雷达对公路、桥梁、交通枢纽等设施进行周期性自主化建模,模型自动导入至管控平台,打造厘米级精度三维实景地图;平台管理人员可点→线→面查看监管场所内巡检目标物历史业务信息;可根据时间轴来查看不同时间点的模型,快速查看场景变化情况。
工作人员可基于管控平台自动规划巡检路线,实现远程启动自主执行巡检任务;可开放API接口,支持公路、服务站、道路卡口等场所的IoT物联设备如监控摄像头接入管控平台,实现地面与空中查验监管设备的智慧物联,交互控制。
智慧巡检识别和大数据分析系统
四维全息管控平台中具备“算法超市”功能,客户可根据需求挑取路政执法、道路养护、应急指挥等不同业务相关的识别算法模型及数据成果分析模型,支持边缘端及云业务端部署及算法标注优化训练功能。
应急救援“指点飞行
“指点飞行”模式下,仅需在三维模型中点击应急点位,四维全息管控平台即可自动实时生成无人机自主巡检航线,并可设置对应无人机拍摄角度。无人机全自动机场采用“就近原则”最先自动分配调度,应急工作无需考虑由哪一台无人机执行任务,完全以结果为导向。
目前,云圣智能空地一体全自主无人机智慧巡检系统已在路政巡查、事故处理、养护巡查、夜间巡查、交通疏导、工程监护等方面进行了智慧化探索。
无人机已经成为各行各业巡检作业中的重要利器,这也意味着高效、安全、智能的巡检时代正在来临。云圣智能将以本次大会为契机,持续探索智慧交通发展的新方向和新势能,以自主研发智慧巡检产品和方案体系,绘就行业发展的新篇章。










